エフェクターを繋ぐため、386スモーキーアンプよりもクリーンで癖のないパワーアンプが欲しくなった。時間をかけず、手頃なIC一発で組むことに。
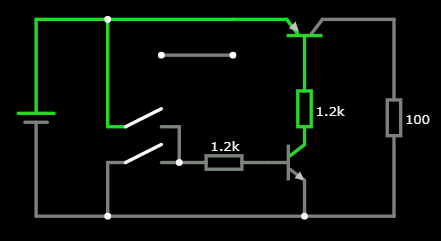
大したものではないが、完成した回路は以下の通り。

■パワーアンプ部分
ネットで参考になりそうな事例を漁っていると、NJM2073の回路がいくつか見つかった。NJMのものはディスコンで秋月でも手に入らないが、M2073というセカンドソースは今でも入手可能のよう。こちらはLM386/NJM386によく似たパワーアンプICだが、ゲイン調整ができない代わりに2回路入りというもの。
2回路あるので、それぞれから逆位相の信号を出すようにし、スピーカーを挟むBTLというつなぎ方もできるらしい。出力用のカップリングコンデンサが不要になるのと、理論上は倍の電流でスピーカーを駆動し大きな音を取り出せることがメリットのよう。
■入力インピーダンスのケア
2073は386系と違って入力抵抗が100kΩと高く使いやすいが、ギターのピックアップやウクレレのピエゾを繋ぐにはまだまだ低インピーダンス。試しにブレッドボードでBTLアンプを組み、7ピンの入力に直接ウクレレのピエゾ出力を繋いでみたが、やはりローがすっぱり消えてしまってキンキン音にしかならない。なので、2SK30Aのソースフォロワを前段に据える。
ソースフォロワ部分は、バイアスをかけず、コンデンサも入れず、入力抵抗も無しにした。試しに1MΩの入力抵抗をつけたが、それでも音痩せしてしまう。ピエゾを受けるには数十MΩが必要なのだろう。入力抵抗無しでも特にノイズが乗ったり等は無かったので、電気回路としてあるべきかはわからないがひとまず無しにした。バイアスとカップリングコンデンサもお作法としては入れるべきなのだろうが、手持ちの楽器を繋ぐ分には特に音割れすることも無かったので割愛した。
本来はソースに固定の抵抗を繋ぎ、コンデンサで交流だけを取り出してから可変抵抗で分圧する。可変抵抗を直接ソースに繋ぐと、ボリュームを絞るほどRCのバランスがハイパスフィルター寄りになり、ローが通らなくなるが、聴覚上問題なかったのでこの構成にしている。
■コンデンサの定数およびの検討
検討といっても、オームの法則とハイパスフィルタ・ローパスフィルタの基本原則くらいしか知らないし、安いテスターしか持っていないので、理論や計測ではなく現物を耳で聞いて自己満で判断しているだけ。
5ピン8ピンの間の104は、データシートだと10uFになっている。これをタンタル10uFにすると、低音も高音もしっかり出るようになった。ケミコン10uFだとローは同じくらいだが、高域が少し濁った感じになる。104だと、程よくローカットされてすっきりする。オーディオアンプとしてはタンタルが1番な感じだが、楽器として使う場合は好みでよいと思う。
5ピンに繋いだ103はデータシート通りだが、これもセラミックにするかフィルムにするか、定数を下げるか等がチューニングのポイントになる。
最後に、スピーカと並列の抵抗+コンデンサがあるが、こちらは発振防止のためのよう。元は1Ω+0.22uFだが、音痩せしすぎるので10Ω+104にしている。
■試運転と雑感
回路図通りにブレッドボードで組んでVOX MINI3のスピーカに直結し、ウクレレとギターで鳴らしてみたが、本当に素直な音がする。足し引きが無いという感じ。
VOX MINI3は音を変えて軽く遊ぶ分には面白いけど、ノイズが多いし弄り回した音になってしまう。エフェクターを繋いでもキャラクターがわかりづらい。対して、2073アンプならエフェクターの個性がよくわかる。
ワンコイン以下で、ウクレレの練習用+ギターのエフェクター試験用アンプという目的達成できたので非常に満足。